三菱空心轴磁粉制动器ZA-1.2Y1特价
智能型工作制动器为实现对制停距离和大制停减 速度的安全控制,就需要采用与常规机-电式制动器不同的工作方式。可变制动力需要制动器在受控状态下实施工作制动,就不能采用直接断电上闸的动作方式。为此需要工作制动器采用与驱动主机电源分别控制,并且在电气安全回路起作用时不能直接切断制动器电源。当该类制动器性能在失电情况下可能导致产生大制动力时,为了防止自动扶梯在电源故障断电时可能产生的非受控制动力造成制停减速度超标,还需对该类工作制动 器配置应急能源以**故障断电时的紧急制动及控制减速度。当采用非机-电式制动器时,按照安全规范的要求,还应配置符合安全规范规定的附加制动器。
电磁制动器可分为电磁粉末制动器和电磁涡流制动器,电磁摩擦式制动器等多种形式。另外还细分为干式单片电磁制动器、干式多片电磁制动器、湿式多片电磁制动器等等。按制动方式电磁制动器又可分为通电制动和断电制动。
①摩擦式制动器。靠制动件与运动件之间的摩擦力制动。
②非摩擦式制动器。制动器的结构形式主要有磁粉制动器(利用磁粉磁化所产生的剪力来制动)、磁涡流制动器(通过调节励磁电流来调节制动力矩的大小)以及水涡流制动器等。
制动件结构形式
又可分为外抱块式制动器、内张蹄式制动器、带式制动器、盘式制动器等;
制动件工作状态
还可分为常闭式制动器(常处于紧闸状态,需施加外力方可解除制动)和常开式制动器(常处于松闸状态,需施加外力方可制动);

鉴于GB 16899明确要求工作制动器动作时,无论载荷状态如何,均需满足下行制停的减速度不大于1m/s2,同时还要求“如果制停距离超过所规定大值的1.2倍,自动扶梯和自动人行道应在故障锁定被复位之后才能重新启动”,因此在防止工作制动器能力过度下降的安全控制设计上,还涉及到制停距离控制值的设定。由于大量的常规停梯在空载工况下实施,而紧急停止通常在带载工况下发生,这就对制停距离控制值的设定和实际控制带来了困难。如果仅设定大制停距离为控制基准值,在空载工况下停梯距离接近大制停距离还未超差时,就可能意味着工作制动器的制动力已经远不能满足满栽安全制停的要求。因此,对于制停距离超过所规定大值的1.2倍的要求,还需考虑结合载荷状态来实施控制。对于空载制停,其受控制停距离应明显小于安全规范规定的大制停距离,理论上应始终以大制停减速度1m/s2作为控制值。空载制停距离的控制值则应由自动扶梯的结构设计来确定。对于具有自动 启动或慢速待机的自动扶梯,停梯载荷状态控制可考虑 结合出入口的感应器的人员计数及运行时间延时控制来实施
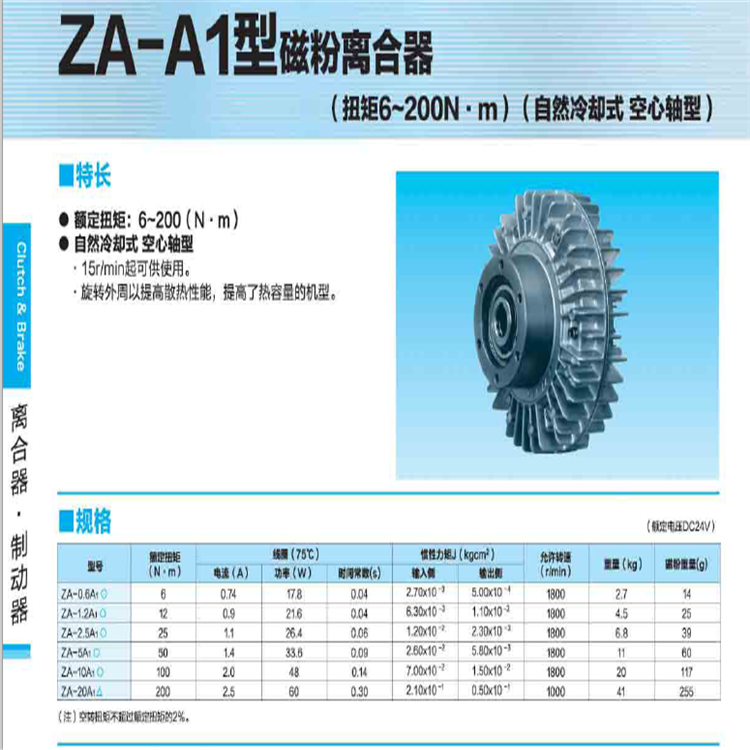
ZKB-10B2-909 ZA-0.6A1ZA-1.2A1ZA-2.5A1ZA-5A1ZA-10A1ZA-20A1ZA-2.5AN1ZA-5AN1
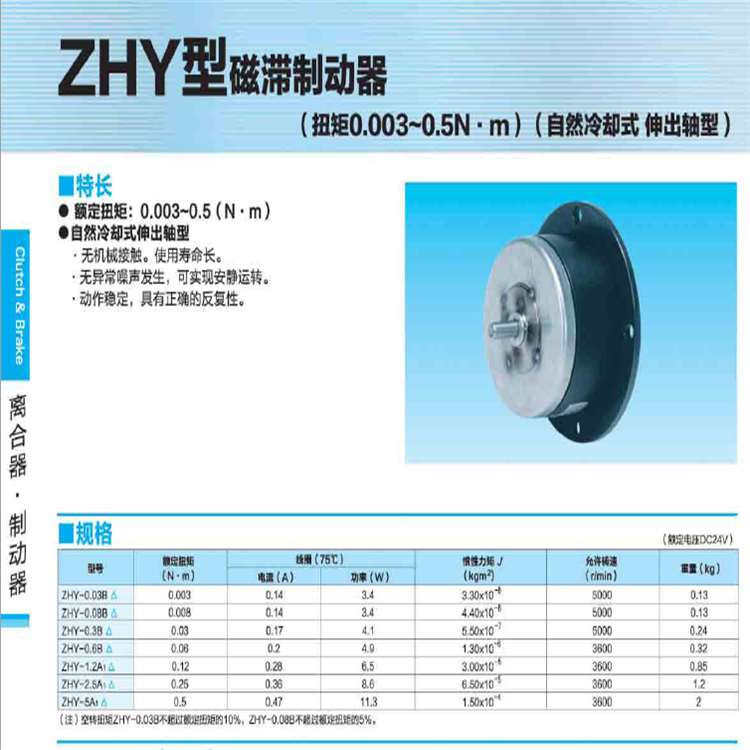
磁粉制动器型号ZX-1.2YN-24ZX-1.2YN-80ZX-0.6YN-24ZX-0.6YN-80 ZX-0.3YN-24ZX-0.3YN-80ZHY-1.2A1ZX-2.5YHZX-2.5YS ZHY-2.5AZHY-5A1ZHY-10AZHY-20Ahttp://www.shsozdh.com